

Computer Vision - Project Cluster



1-Input 3-Output Mechanical Differential Pipe Crawler
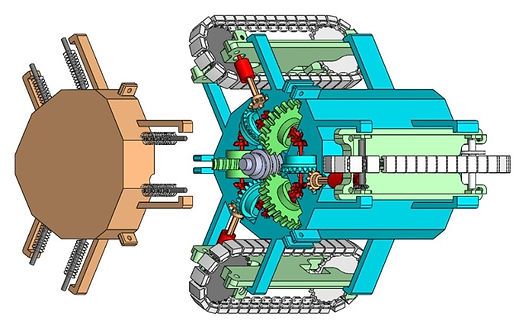
The robot houses a novel mechanism for controlling 3 outputs with a single input, extending the 2-output differential concept. This eliminates the use of any active control of the 3 wheels/tracks.
The robot is orientation indifferent and successfully traverses pipe networks autonomously. The mechanism enables climbing against gravity and reduces slip and drag.
Flexible Modular Pipe Climber


Robocon 2018


Indo-German Challenge for Sustainable Production

The project aimed to gather sensor data from the Festo Learning Factory (X-Line). It was then hosted live on the local server for the 'Life Cycle Analysing' Team to find out the carbon footprint of the product.
We were a team of 5, comprising students from different nations - the 'Data Acquisition and Visualization' Team
Autonomous Mapping of Dark and Unknown Environment
The project aimed to propose a successful mapping alternative to known techniques of SLAM. It was made computationally less heavy and complex. It uses ROS Kinetic for control and simulation was done on Gazebo
A comparative study has been done with other mapping techniques. Since it is applied for a conference, not all details can be revealed yet. Once it is approved for 2D mapping, it will be extended to a 3D world.